

Are smartphones a viable alternative to the surveying pole?
What's the future of the surveying pole—is it necessary in order to obtain high-accuracy results for surveying? In our latest test, we compared traditional point surveying using a leveled GNSS antenna on a surveying pole against smartphone 3D scanning. We used PIX4Dcatch running on an iPhone 15, Pix4D Autotags and Pix4D's GeoFusion algorithm.
Two test sites were used to survey several points multiple times, with mean values and statistics computed for each method. The results show that both approaches achieved similar standard deviations—around 1cm in X, Y, and Z—with differences on the order of 1cm. This suggests that mobile capture offers an accurate, efficient alternative to conventional survey poles.
You can read the published paper in full here
From poles to phones: comparing GNSS survey methods
GNSS point surveys are widely used to collect street outlines, curves, manholes, road markings, and more—data that is typically integrated into GIS databases. In this study, we compare two methods: the traditional survey using a leveled pole versus a modern approach using Pix4D Autotags detected by smartphone scanning with an RTK device attached.
Recent iPhone Pro models combine high-resolution cameras with built-in LiDAR sensors, leveraged by the PIX4Dcatch app to collect data that can be converted into precise 3D models offline. The Autotag feature allows for direct survey point detection without additional post-processing.
We evaluated the repeatability and accuracy of both survey methods by comparing multiple measurements from two test sites. By combining mobile tracking, GNSS signals, and photogrammetric triangulation, we found that the handheld solution offered a faster alternative to the traditional method while delivering comparable accuracy.
The evaluation
For the evalution we used an iPhone 15 Pro with an Emlid REACH RX RTK device connected by Bluetooth, and tested across two sites.
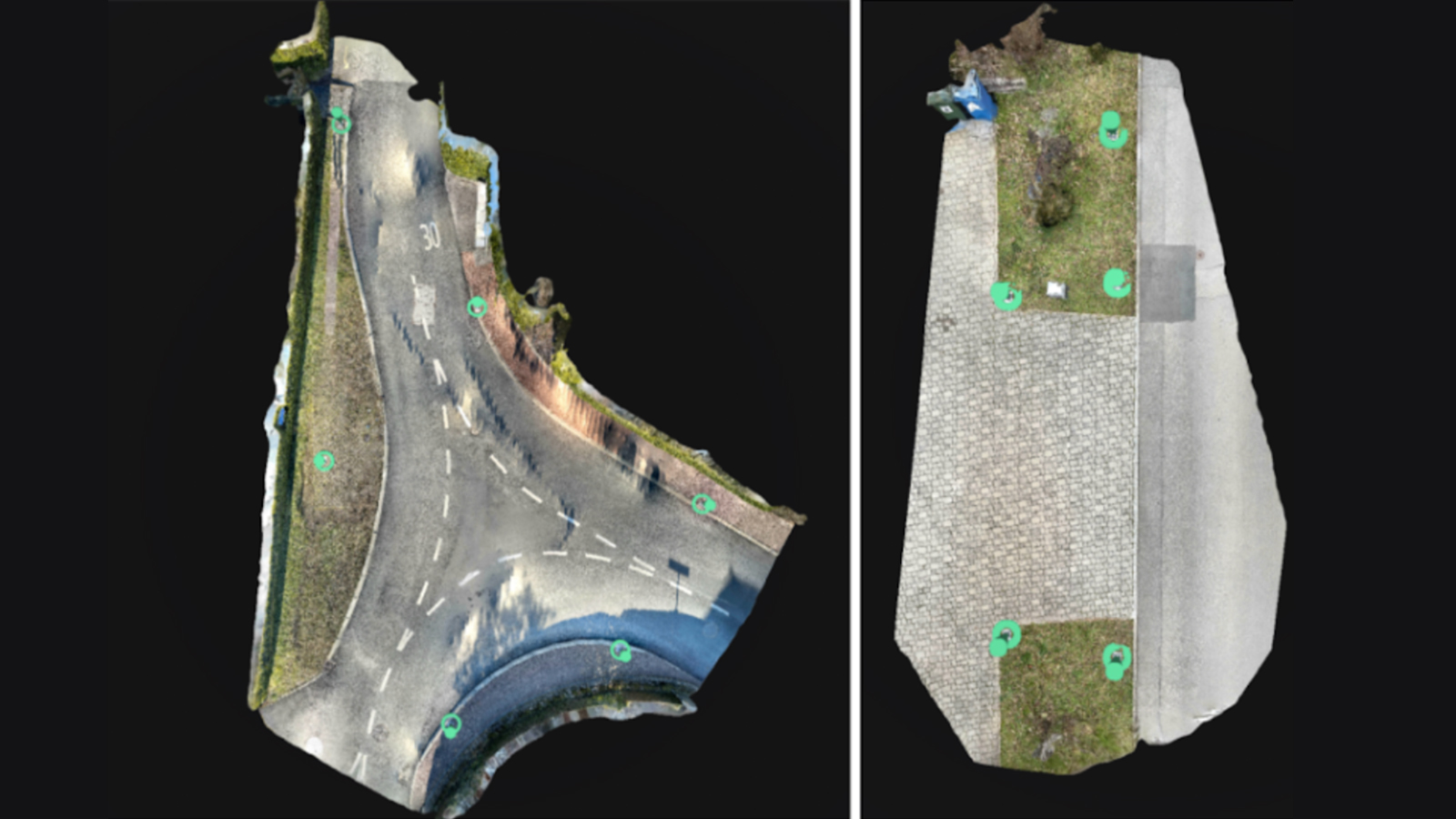
Both sites are shown above. The left-hand site is a junction with six Autotags, surveyed three times using the traditional leveled pole and six times with the handheld scanner—all on the same day. With the site on the right we used five Autotags and surveyed it with both methods over three different days.
Both sites enjoyed excellent satellite visibility, with no significant obstacles to block signals or cause reflections. We used UTM 32N with ellipsoidal height as our coordinate system. For the traditional survey: a leveled pole was used, setting the antenna at 2m. We used the traditional surveying function available in PIX4Dcatch to survey each point for 30 seconds. For the hand-held survey: PIX4Dcatch’s standard settings were used.
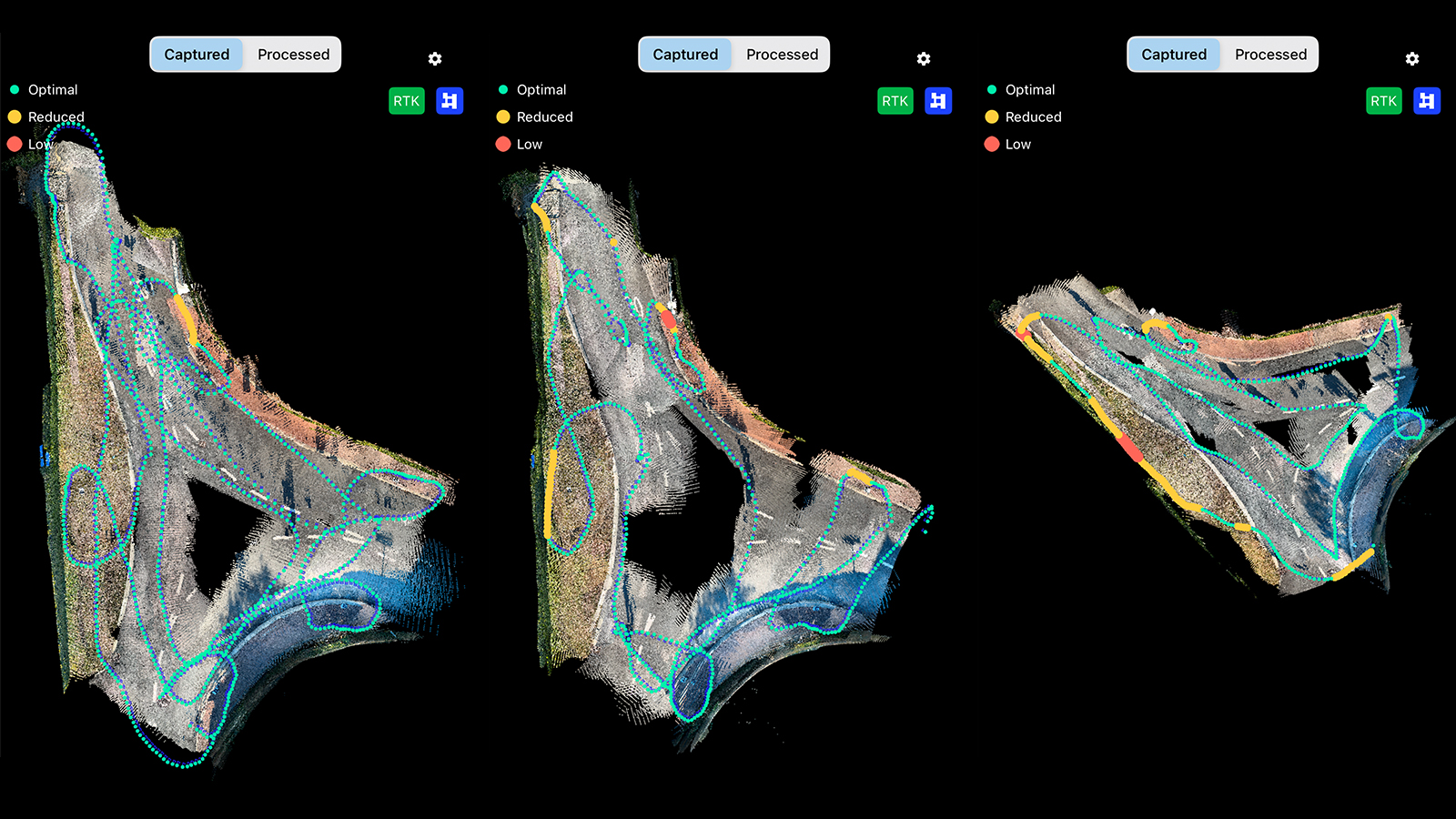
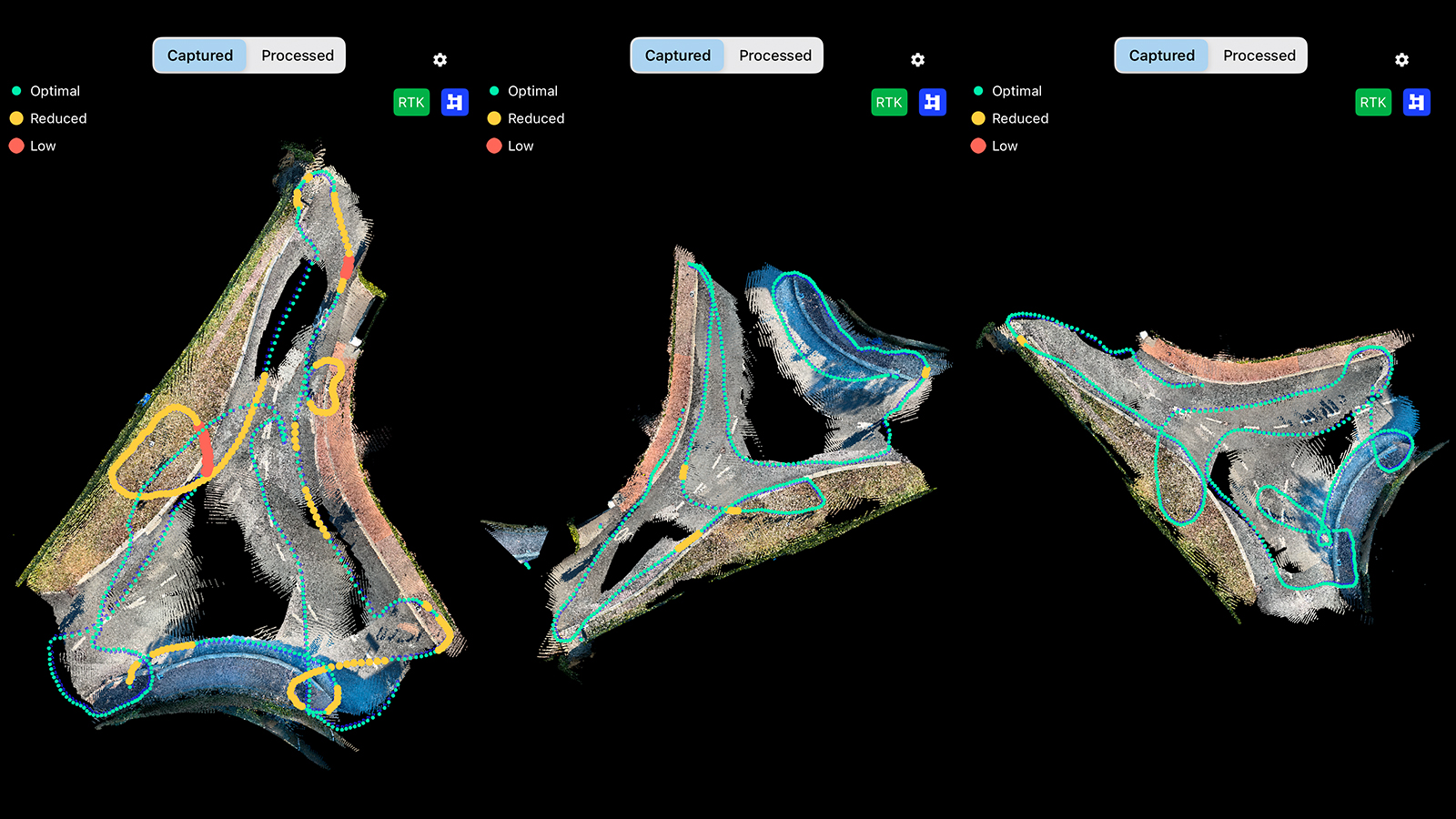
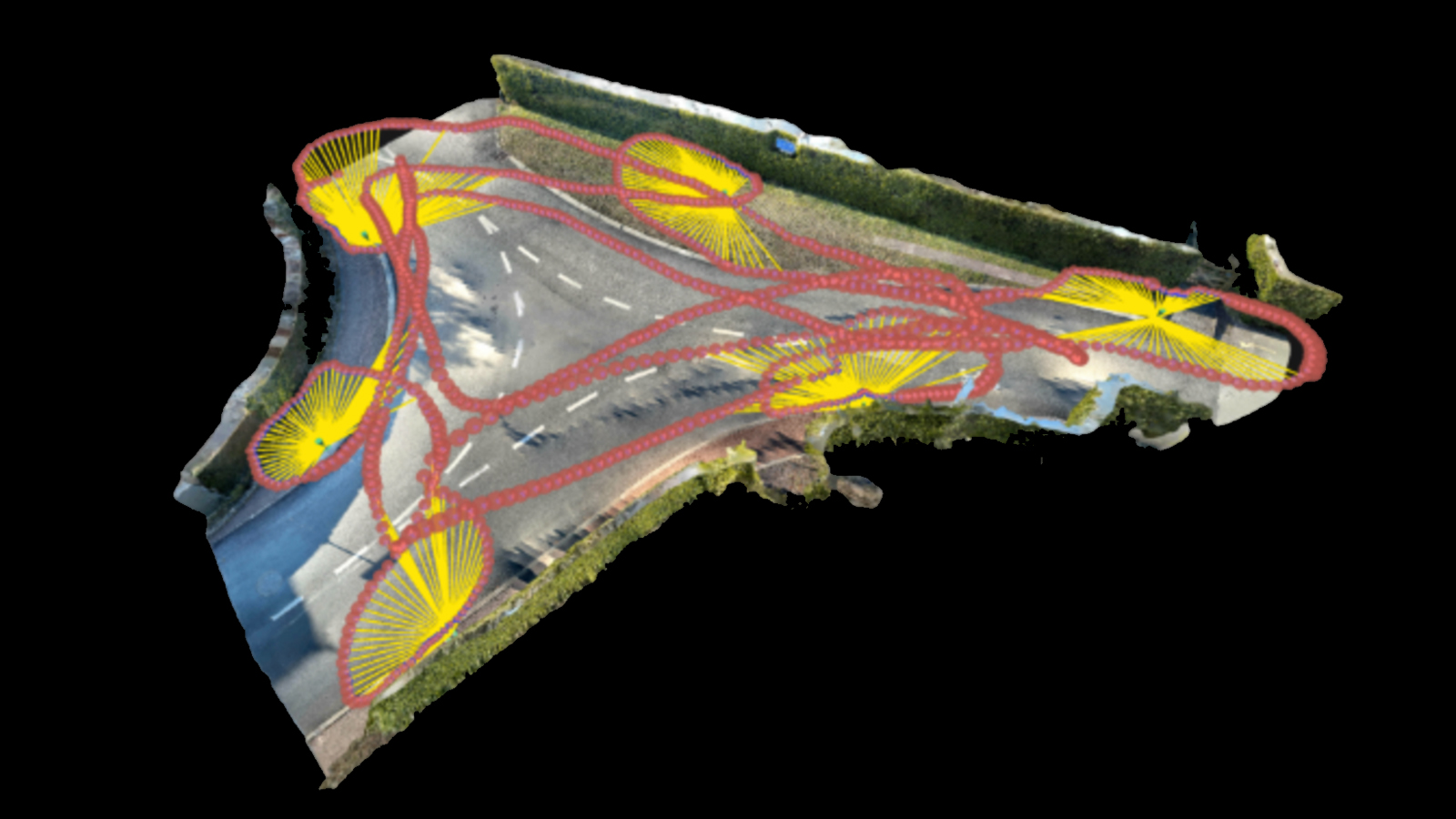
Each survey covered all Autotags along different paths, as shown in the diagram below.
Repeatability of survey point measurements with PIX4Dcatch
We conducted an independent statistical analysis of our two surveying methods, and our tests revealed that both yield similar standard deviations (σ). We then compared the methods based on their actual 3D differences. Table 2, shown below, shows the RMS error between the average of each method on the 11 points in our experiments. One can see that both methods yield the same coordinates up to half a centimeter.
For further details, you can read the full technical report here.

The traditional method relies on a surveying pole to integrate the GNSS signal over time—30-second observations in our case. The pole’s fixed, known height, combined with precise leveling, ensures that the GNSS antenna’s position is accurately translated to the survey point based on that constant height. This reliable relationship between the antenna and the survey point provides a robust constraint, contributing to the overall accuracy of this approach.
However, the handheld method works differently. As you move with the device, images are continuously captured, and their positions are determined using the pre-calibrated relative position and orientation between the phone's camera center and the GNSS antenna. Although each Autotag detected by PIX4Dcatch provides a weaker constraint compared to the fixed pole, the large number of Autotags captured helps compensate, contributing to overall robust accuracy.
Overall, our findings show that both traditional and handheld surveying methods achieve similar accuracy—the fact that survey points appear in multiple images on the handheld survey likely contributes to this result.
As a next step, it would be interesting to test how accuracy is affected when fewer images capture a survey point, as this could reveal the minimum number needed to get reliable results—a crucial factor in environments where capturing many images is challenging!

